Graduate Course Projects
Artificial Intelligence and Machine Learning for Engineers | Carnegie Mellon University
Machine Learning and Feature Engineering for Artist Classification
- Created a CNN Model with 7 fully connected layers. Trained it on a labelled art-artist dataset
- Got a 13% higher accuracy when testing against shallow ML techniques for 25 artists
Planning and Decision Making | Carnegie Mellon University
Multi-Agent Planning for Search at Sea
- Used TIGRIS planner + Trochoidal Path Solver for Multi-Agent Planning for Search Operations at Sea
- Fed in Belief Space from one UAV into the second UAV and used it to plan paths such that they would not collide
- Visualized these paths using RViz in a custom search map, given planning parameters such as curvature radius, start and goal pose
- Goal: Achieving Goal State with maximum reduction in Shannon Entropy without coverage of the same area
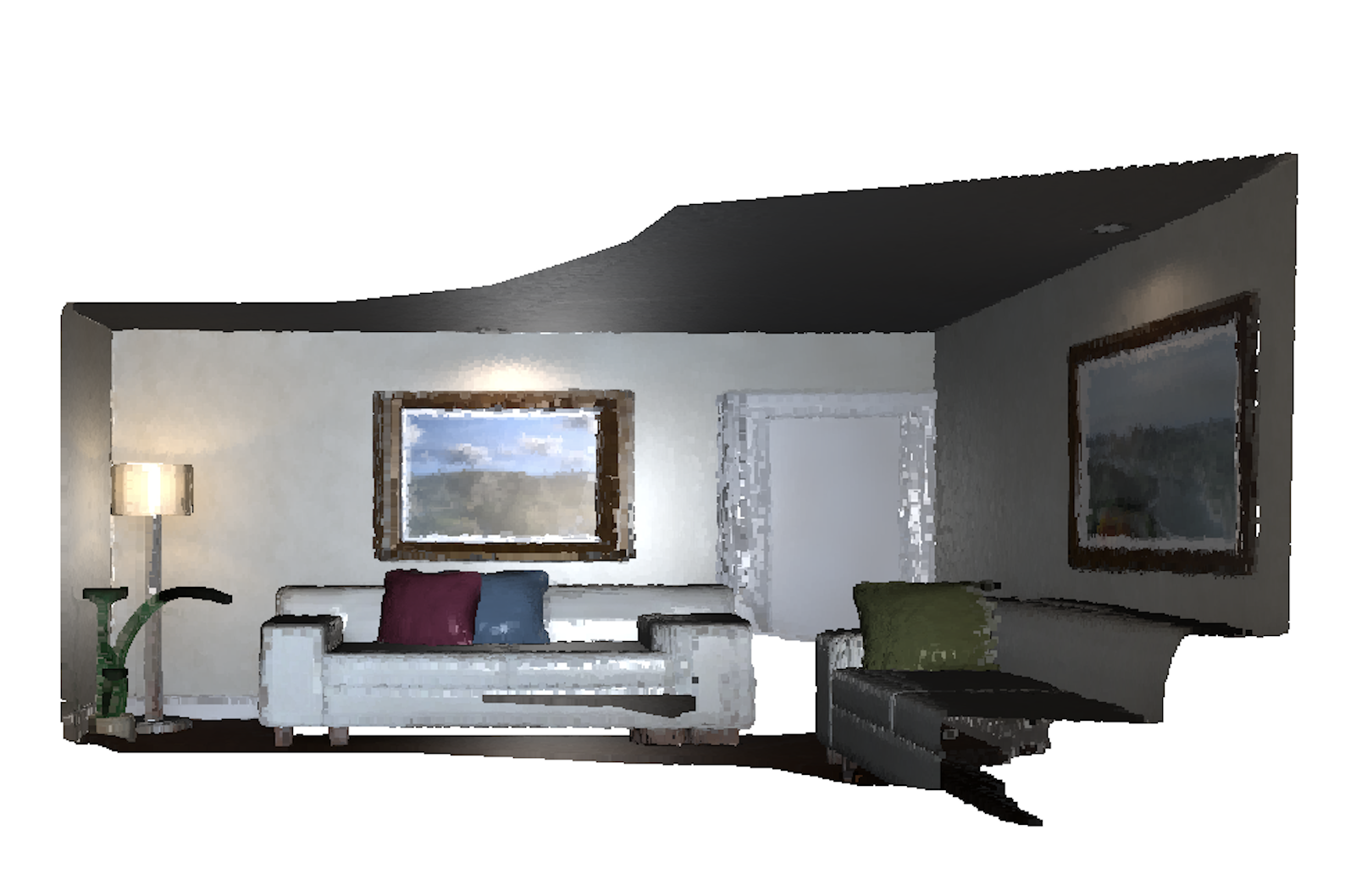
Localization and Mapping | Carnegie Mellon University
Graph Optimization of ORB Features
- Extracted ORB features and implemented Graph Factorization using GTSAM in Python3 and compared this against ground truth measurements
- Used the GTSAM functions and visual odometry to match points between frames
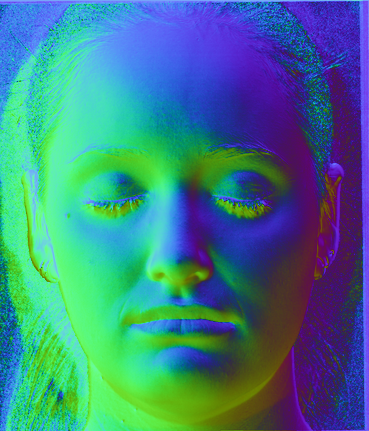
Computer Vision | Carnegie Mellon University
Miscellaneous Projects
- Implemented a Lucas Kanade tracker
- Did spatial pyramid matching for scene classification
- Trained a CNN to be able to read handwritten text
Undergraduate Course Projects
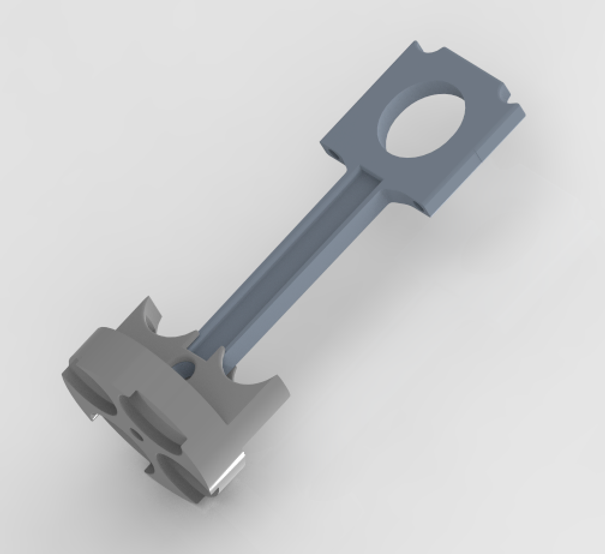
Design for Manufacturability | University of Illinois at Urbana-Champaign (UIUC)
Yamaha R6-YZF Piston Optimization
- Re-ideated a Yamaha R6-YZF Engine Piston to reduce complexities and manufacturing costs
- Computed manufacturing costs using aPriori software which takes a CAD model as an input
- Re-ideation resulted in a 7% decrease in manufacturing costs
Thermodynamics | University of Illinois at Urbana-Champaign (UIUC)
Cost Effective Stirling Engine
- Constructed a miniature stirling engine using a tea-light candle to demonstrate the Stirling cycle principles
- Objective was to lift a quarter through the Stirling Cycle
Mechatronics | University of Illinois at Urbana-Champaign (UIUC)
Self-Balancing Segbot with Obstacle Detection
- Tuned PID balance control using MATLAB and Simulink, accomplishing optimal balance by adjusting system stability and response through state-space pole placement tuning
- Upgraded Segbot functionality by integrating ultrasonic sensor hardware and software in C, enabling obstacle detection