Work Experience
’
Forward Deployed Robotics Engineer | FieldAI (Feb 2026 - Present)
- Deploy Boston Dynamics Spot robots on active customer sites, integrating FieldAI’s full autonomy stack into real-world industrial environments
- Develop and deliver client-specific features outside the core product roadmap, bridging customer operational needs with FieldAI’s platform capabilities
- Act as the primary feedback loop between the field and engineering teams — systematically reproducing, documenting, and triaging bugs discovered in production deployments to drive rapid resolution
- Serve as L3 escalation support: own and resolve complex field issues that cannot be addressed by application engineers after two rounds of debugging, and route unresolved cases to the appropriate engineering teams
Robotics Deployment Engineer | Path Robotics (Sept 2023 - Feb 2026)
Multi Arm Robot Deployment

- Deployed the company’s first AW-3 multi-robot production system at a customer site
- Developed calibration plugins and automation scripts using Python, Bash and C++, cutting deployment bring-up time by 30%
- Served as codeowner for robot configurations (URDF, MoveIt, clearance planner configurations)
- Built, debugged, and deployed robotic applications in ROS.
- Created documentation and trained new engineers, ensuring smooth knowledge transfer to the operations team
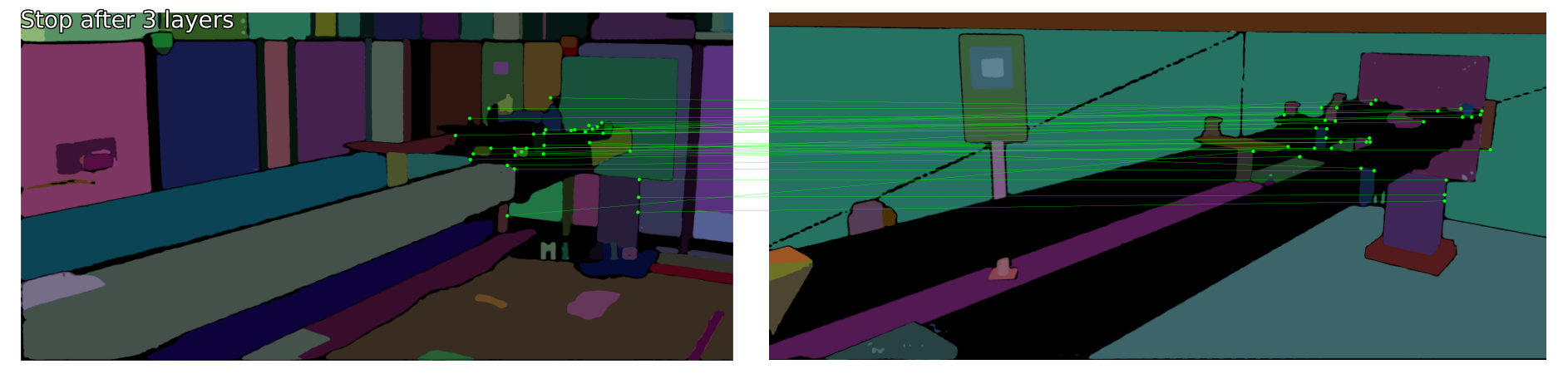
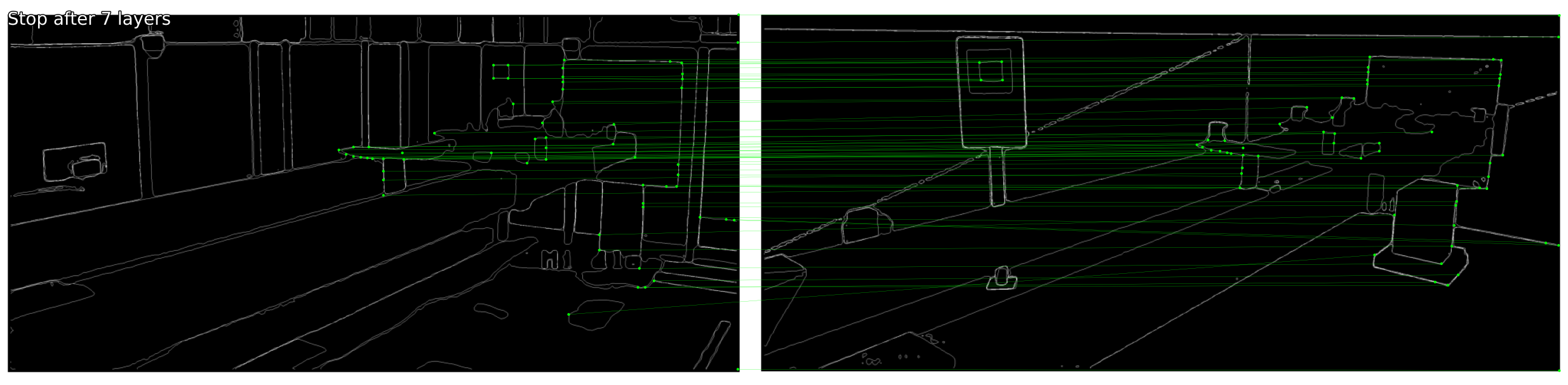
- Experimented with Meta’s Segment Anything Model (SAM) to automate URDF validation by: extracting segmentation masks from CCTV images of robotic systems, generating corresponding masks from the 3D URDF model using camera intrinsics/extrinsics, and applying LightGlue for feature matching and validation
- Wrote approach strategies and workflows in Python for Path Robotics’ flagship pick, place and weld (AF-1) robotic system, achieving a welding accuracy of 95%
- Computed spatial transforms and implemented a software testing and release pipeline for production deployment of a custom perception hardware package, achieving higher scan cloud point densities, increased seam accessibility, and improved non-rigid registration performance.
Raw Segment Anything Model (SAM) Results + LightGlue Output:
Final Processed Results + LightGlue Output:
First multi-robot system deployment: